High power all metal magnetically coupled coarse linear and rotary transfer device for UHV applications, using only UHV accepted metals within its construction. Providing smooth sample transfer movement within the vacuum chamber, where high accuracy is not required.
High power all metal magnetically coupled coarse linear and rotary transfer device for UHV applications, using only UHV accepted metals within its construction. Providing smooth sample transfer movement within the vacuum chamber, where high accuracy is not required.
High power all metal magnetically coupled coarse linear and rotary transfer device for UHV applications, using only UHV accepted metals within its construction. Providing smooth sample transfer movement within the vacuum chamber, where high accuracy is not required.
Pincer Grip Wobble are used where linear and angular movement is required to move a 14mm disk samples inside vacuum via an inline pincer grip. The pincer grip allows for four pre-set rotation position at 90 intervals. Edge welded bellows, gives the user a true 'feeling' of position inside the vacuum chamber to give a controlled positioning.
Pincer Grip Wobble are used where linear and angular movement is required to move a 14mm disk samples inside vacuum via an inline pincer grip. The pincer grip allows for four pre-set rotation position at 90 intervals. Edge welded bellows, gives the user a true 'feeling' of position inside the vacuum chamber to give a controlled positioning.
Pincer Grip Wobble are used where linear and angular movement is required to move a 14mm disk samples inside vacuum via an inline pincer grip. The pincer grip allows for four pre-set rotation position at 90 intervals. Edge welded bellows, gives the user a true 'feeling' of position inside the vacuum chamber to give a controlled positioning.
Pincer Grip Wobble are used where linear and angular movement is required to move a 14mm disk samples inside vacuum via an inline pincer grip. The pincer grip allows for four pre-set rotation position at 90 intervals. Edge welded bellows, gives the user a true 'feeling' of position inside the vacuum chamber to give a controlled positioning.
High power all metal magnetically coupled coarse linear and rotary transfer device for UHV applications, using only UHV accepted metals within its construction. Providing smooth sample transfer movement within the vacuum chamber, where high accuracy is not required.
High power all metal magnetically coupled coarse linear and rotary transfer device for UHV applications, using only UHV accepted metals within its construction. Providing smooth sample transfer movement within the vacuum chamber, where high accuracy is not required.
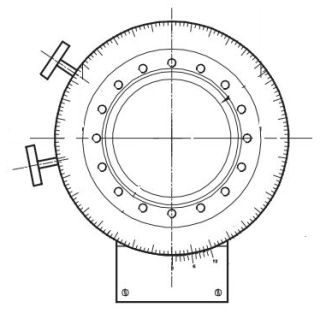
Rotating platforms require minimal space at only 43mm and offer the means of translating rotation through a vessel wall without losing vacuum integrity, enabling probes such as large Cryostats to be inserted without effect on the chamber pressure. To maintain the rotary seal, two vacuum ports are mounted to the base flange of the assembly allowing connection to an appropriate independent pumps. These have a 55mm clear bore with coarse and fine control available in addition to motorised options.
Rotating platforms require minimal space at only 43mm and offer the means of translating rotation through a vessel wall without losing vacuum integrity, enabling probes such as large Cryostats to be inserted without effect on the chamber pressure. To maintain the rotary seal, two vacuum ports are mounted to the base flange of the assembly allowing connection to an appropriate independent pumps. These have a 55mm clear bore with coarse and fine control available in addition to motorised options.
Rotating platforms require minimal space at only 43mm and offer the means of translating rotation through a vessel wall without losing vacuum integrity, enabling probes such as large Cryostats to be inserted without effect on the chamber pressure. To maintain the rotary seal, two vacuum ports are mounted to the base flange of the assembly allowing connection to an appropriate independent pumps. These have a 55mm clear bore with coarse and fine control available in addition to motorised options.
Rotating platforms require minimal space at only 43mm and offer the means of translating rotation through a vessel wall without losing vacuum integrity, enabling probes such as large Cryostats to be inserted without effect on the chamber pressure. To maintain the rotary seal, two vacuum ports are mounted to the base flange of the assembly allowing connection to an appropriate independent pumps. These have a 55mm clear bore with coarse and fine control available in addition to motorised options.
Mechanical hands are used for transferring a sample where linear, angular and rotary movement is required. The pistol grip which actuates the movement and the use of edge welded bellows, gives the user a true 'feeling' of position inside the vacuum chamber to give a controlled transfer. These can be supplied with or without the pincer grip. If supplied with a pincer, these can be inline or perpendicular, with plain jaws or jaws to accept the flag style sample plate.
Mechanical hands are used for transferring a sample where linear, angular and rotary movement is required. The pistol grip which actuates the movement and the use of edge welded bellows, gives the user a true 'feeling' of position inside the vacuum chamber to give a controlled transfer. These can be supplied with or without the pincer grip. If supplied with a pincer, these can be inline or perpendicular, with plain jaws or jaws to accept the flag style sample plate.
Mechanical hands are used for transferring a sample where linear, angular and rotary movement is required. The pistol grip which actuates the movement and the use of edge welded bellows, gives the user a true 'feeling' of position inside the vacuum chamber to give a controlled transfer. These can be supplied with or without the pincer grip. If supplied with a pincer, these can be inline or perpendicular, with plain jaws or jaws to accept the flag style sample plate.
Mechanical hands are used for transferring a sample where linear, angular and rotary movement is required. The pistol grip which actuates the movement and the use of edge welded bellows, gives the user a true 'feeling' of position inside the vacuum chamber to give a controlled transfer. These can be supplied with or without the pincer grip. If supplied with a pincer, these can be inline or perpendicular, with plain jaws or jaws to accept the flag style sample plate.
Mechanical hands are used for transferring a sample where linear, angular and rotary movement is required. The pistol grip which actuates the movement and the use of edge welded bellows, gives the user a true 'feeling' of position inside the vacuum chamber to give a controlled transfer. These can be supplied with or without the pincer grip. If supplied with a pincer, these can be inline or perpendicular, with plain jaws or jaws to accept the flag style sample plate.
Mechanical hands are used for transferring a sample where linear, angular and rotary movement is required. The pistol grip which actuates the movement and the use of edge welded bellows, gives the user a true 'feeling' of position inside the vacuum chamber to give a controlled transfer. These can be supplied with or without the pincer grip. If supplied with a pincer, these can be inline or perpendicular, with plain jaws or jaws to accept the flag style sample plate.
Mechanical hands are used for transferring a sample where linear, angular and rotary movement is required. The pistol grip which actuates the movement and the use of edge welded bellows, gives the user a true 'feeling' of position inside the vacuum chamber to give a controlled transfer. These can be supplied with or without the pincer grip. If supplied with a pincer, these can be inline or perpendicular, with plain jaws or jaws to accept the flag style sample plate.
Mechanical hands are used for transferring a sample where linear, angular and rotary movement is required. The pistol grip which actuates the movement and the use of edge welded bellows, gives the user a true 'feeling' of position inside the vacuum chamber to give a controlled transfer. These can be supplied with or without the pincer grip. If supplied with a pincer, these can be inline or perpendicular, with plain jaws or jaws to accept the flag style sample plate.
Mechanical hands are used for transferring a sample where linear, angular and rotary movement is required. The pistol grip which actuates the movement and the use of edge welded bellows, gives the user a true 'feeling' of position inside the vacuum chamber to give a controlled transfer. These can be supplied with or without the pincer grip. If supplied with a pincer, these can be inline or perpendicular, with plain jaws or jaws to accept the flag style sample plate.
Mechanical hands are used for transferring a sample where linear, angular and rotary movement is required. The pistol grip which actuates the movement and the use of edge welded bellows, gives the user a true 'feeling' of position inside the vacuum chamber to give a controlled transfer. These can be supplied with or without the pincer grip. If supplied with a pincer, these can be inline or perpendicular, with plain jaws or jaws to accept the flag style sample plate.
Mechanical hands are used for transferring a sample where linear, angular and rotary movement is required. The pistol grip which actuates the movement and the use of edge welded bellows, gives the user a true 'feeling' of position inside the vacuum chamber to give a controlled transfer. These can be supplied with or without the pincer grip. If supplied with a pincer, these can be inline or perpendicular, with plain jaws or jaws to accept the flag style sample plate.
Mechanical hands are used for transferring a sample where linear, angular and rotary movement is required. The pistol grip which actuates the movement and the use of edge welded bellows, gives the user a true 'feeling' of position inside the vacuum chamber to give a controlled transfer. These can be supplied with or without the pincer grip. If supplied with a pincer, these can be inline or perpendicular, with plain jaws or jaws to accept the flag style sample plate.
Mechanical hands are used for transferring a sample where linear, angular and rotary movement is required. The pistol grip which actuates the movement and the use of edge welded bellows, gives the user a true 'feeling' of position inside the vacuum chamber to give a controlled transfer. These can be supplied with or without the pincer grip. If supplied with a pincer, these can be inline or perpendicular, with plain jaws or jaws to accept the flag style sample plate.
Mechanical hands are used for transferring a sample where linear, angular and rotary movement is required. The pistol grip which actuates the movement and the use of edge welded bellows, gives the user a true 'feeling' of position inside the vacuum chamber to give a controlled transfer. These can be supplied with or without the pincer grip. If supplied with a pincer, these can be inline or perpendicular, with plain jaws or jaws to accept the flag style sample plate.
Mechanical hands are used for transferring a sample where linear, angular and rotary movement is required. The pistol grip which actuates the movement and the use of edge welded bellows, gives the user a true 'feeling' of position inside the vacuum chamber to give a controlled transfer. These can be supplied with or without the pincer grip. If supplied with a pincer, these can be inline or perpendicular, with plain jaws or jaws to accept the flag style sample plate.
Mechanical hands are used for transferring a sample where linear, angular and rotary movement is required. The pistol grip which actuates the movement and the use of edge welded bellows, gives the user a true 'feeling' of position inside the vacuum chamber to give a controlled transfer. These can be supplied with or without the pincer grip. If supplied with a pincer, these can be inline or perpendicular, with plain jaws or jaws to accept the flag style sample plate.
Plain wobble sticks are used where linear and angular movement is required to move a custom probe mounted to the end of the linear movement, via a 5mm mounting hole. Edge welded bellows, gives the user a true 'feeling' of position inside the vacuum chamber to give a controlled positioning.
Plain wobble sticks are used where linear and angular movement is required to move a custom probe mounted to the end of the linear movement, via a 5mm x 8mm deep mounting hole. Edge welded bellows, gives the user a true 'feeling' of position inside the vacuum chamber to give a controlled positioning.
Dedicated 18mm flag style pincer grip wobble stick are used where linear and angular movement is required to move flag sample plates in vacuum These come in two designs, inline and perpendicular sample pick up. Edge welded bellows, gives the user a true 'feeling' of position inside the vacuum chamber to give a controlled positioning.
Dedicated 18mm flag style pincer grip wobble stick are used where linear and angular movement is required to move flag sample plates in vacuum These come in two designs, inline and perpendicular sample pick up. Edge welded bellows, gives the user a true 'feeling' of position inside the vacuum chamber to give a controlled positioning.
Dedicated 18mm flag style pincer grip wobble stick are used where linear and angular movement is required to move flag sample plates in vacuum These come in two designs, inline and perpendicular sample pick up. Edge welded bellows, gives the user a true 'feeling' of position inside the vacuum chamber to give a controlled positioning.
Dedicated 18mm flag style pincer grip wobble stick are used where linear and angular movement is required to move flag sample plates in vacuum These come in two designs, inline and perpendicular sample pick up. Edge welded bellows, gives the user a true 'feeling' of position inside the vacuum chamber to give a controlled positioning.
Dedicated 18mm flag style pincer grip wobble stick are used where linear and angular movement is required to move flag sample plates in vacuum These come in two designs, inline and perpendicular sample pick up. Edge welded bellows, gives the user a true 'feeling' of position inside the vacuum chamber to give a controlled positioning.
The Transax Z axis linear shift mechanism is a single bellows stand alone module, with a hinged NW40CF (70mmOD) top flange, two guide shafts positioned each side of the drive screw, encased in a strengthening outer shell to prevent twisting. This structure coupled with cast and precision machined flange supports allows the device to offer stability.
The Transax Z axis linear shift mechanism is a single bellows stand alone module, with a hinged NW40CF (70mmOD) top flange, two guide shafts positioned each side of the drive screw, encased in a strengthening outer shell to prevent twisting. This structure coupled with cast and precision machined flange supports allows the device to offer stability.
The Transax Z axis linear shift mechanism is a single bellows stand alone module, with a hinged NW40CF (70mmOD) top flange, two guide shafts positioned each side of the drive screw, encased in a strengthening outer shell to prevent twisting. This structure coupled with cast and precision machined flange supports allows the device to offer stability.
The Omniax XY module is designed as a standalone single edge welded bellows module which is compatible with Omniax linear shift mechanisms (Z axis) and Rotating platforms such as the RP100, allowing a complete sample manipulator to be created by adding these modules together.
The Transax XY module is designed as a standalone single edge welded bellows module which is compatible with Transax linear shift mechanisms (Z axis) and Rotating platforms such as the RP100, allowing a complete sample manipulator to be created by adding these sections together.
The RD2 has primary rotation with secondary linear movement for the Azimuthal rotation of the sample plate on the 12mm and 24mm versions of SH2 sample holders. The RD2 is a manual or motorised high precision rotary drive, with a 256mm shaft length. The RD2 is fitted with Index scale, rotation stops and position lock. We also offer a custom shaft extension with bearing housing to suit custom requirements. The RD2 is low backlash, with smooth continuous primary rotation via a 9.5 mm diameter…
The RD2 has primary rotation with secondary linear movement for the Azimuthal rotation of the sample plate on the 12mm and 24mm versions of SH2 sample holders. The RD2 is a manual or motorised high precision rotary drive, with a 256mm shaft length. The RD2 is fitted with Index scale, rotation stops and position lock. We also offer a custom shaft extension with bearing housing to suit custom requirements. The RD2 is low backlash, with smooth continuous primary rotation via a 9.5 mm diameter…
This jaw assembly is a plain style jaw, for flag style transfer please contact sales@vacgen.com. A flag detail is required in the end of the jaw to accommodate flag transfer. Mechanical hands are used for transferring a sample where linear, angular and rotary movement is required. The pistol grip which actuates the movement and the use of edge welded bellows, gives the user a true 'feeling' of position inside the vacuum chamber to give a controlled transfer. These can be supplied with or…
This jaw assembly is a plain style jaw, for flag style transfer please contact sales@vacgen.com. A flag detail is required in the end of the jaw to accommodate flag transfer. Mechanical hands are used for transferring a sample where linear, angular and rotary movement is required. The pistol grip which actuates the movement and the use of edge welded bellows, gives the user a true 'feeling' of position inside the vacuum chamber to give a controlled transfer. These can be supplied with or…